Actuators, Free Full-Text
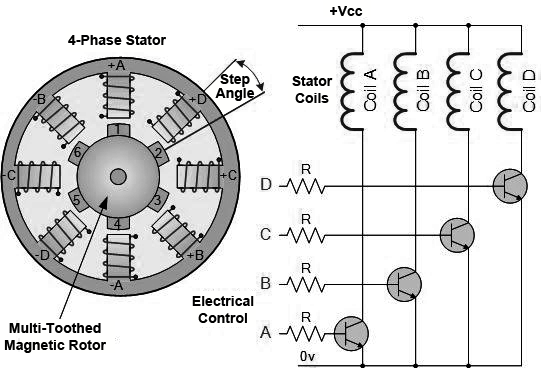
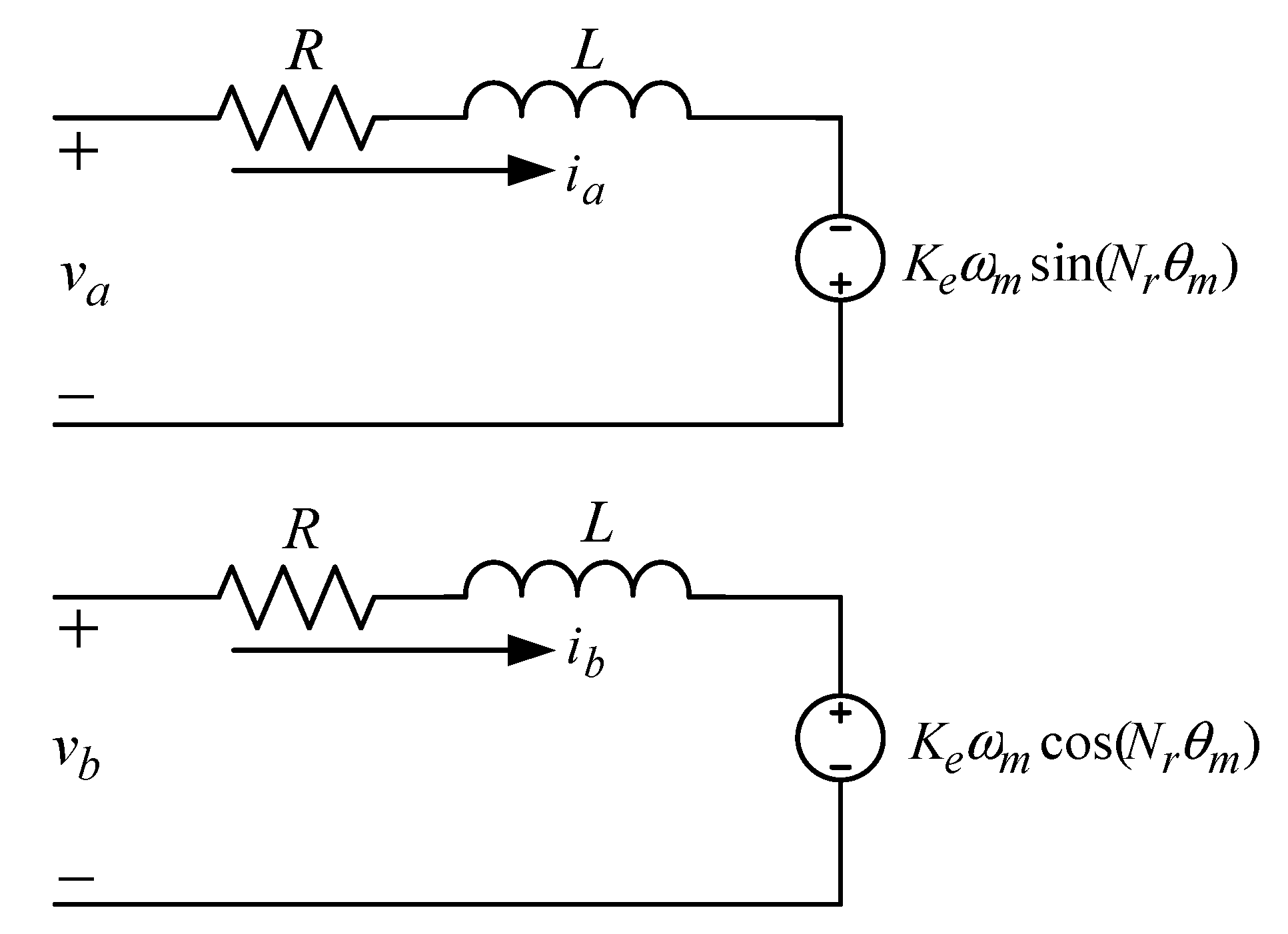
A stepper motor is usually operated in position open-loop control for simplicity. However, in order to improve the transient and steady-state performances of the stepper motor-based drive system, a high performance stepper motor drive system is usually designed to feed the encoder signal back to form a closed-loop system such as a general servo motor drive, and high-performance position and speed loop controller can then be used to overcome the nonlinear characteristics of the motor, such as the cogging force and impacts from external load. On the other hand, the existed cogging force of the hybrid stepper motor must be solved to increase the positioning precision. The variable structure control (VSC) is insensitive to the bounded uncertainty and load disturbance, and has been known as a high-performance controller. A predefined sliding surface is used to shape the system performances, and incorporate with switching control to achieve the robustness property. Thus, we applied the VSC to implement the stepper motor drive system about the position and speed control, and the switching control is used to overcome the cogging force. The field programmable gate array (FPGA) is a good alternative to be used to realize a motor drive system by considering its programmable ability and diverse designing environment. It is easily developed as an intellectual property (IP) for future use or combined as a part of a large control system. This paper showed the procedures to develop the hardware circuits for the variable structure controller, and applied it to stepper motor position and velocity control. Functions such as PI controllers, dq-axis transformation and two-phase space vector space vector modulation (SVPWM) designed for the stepper motor drives are also shown in the paper. The system simulation and hardware circuit realization are based on MATLAB/Simulink, and realized on Altera FPGA. Simulations on MATLAB/Simulink with trapezoidal velocity profile command, and experiments with and without the load added are shown to demonstrate the hardware performances and correctness.
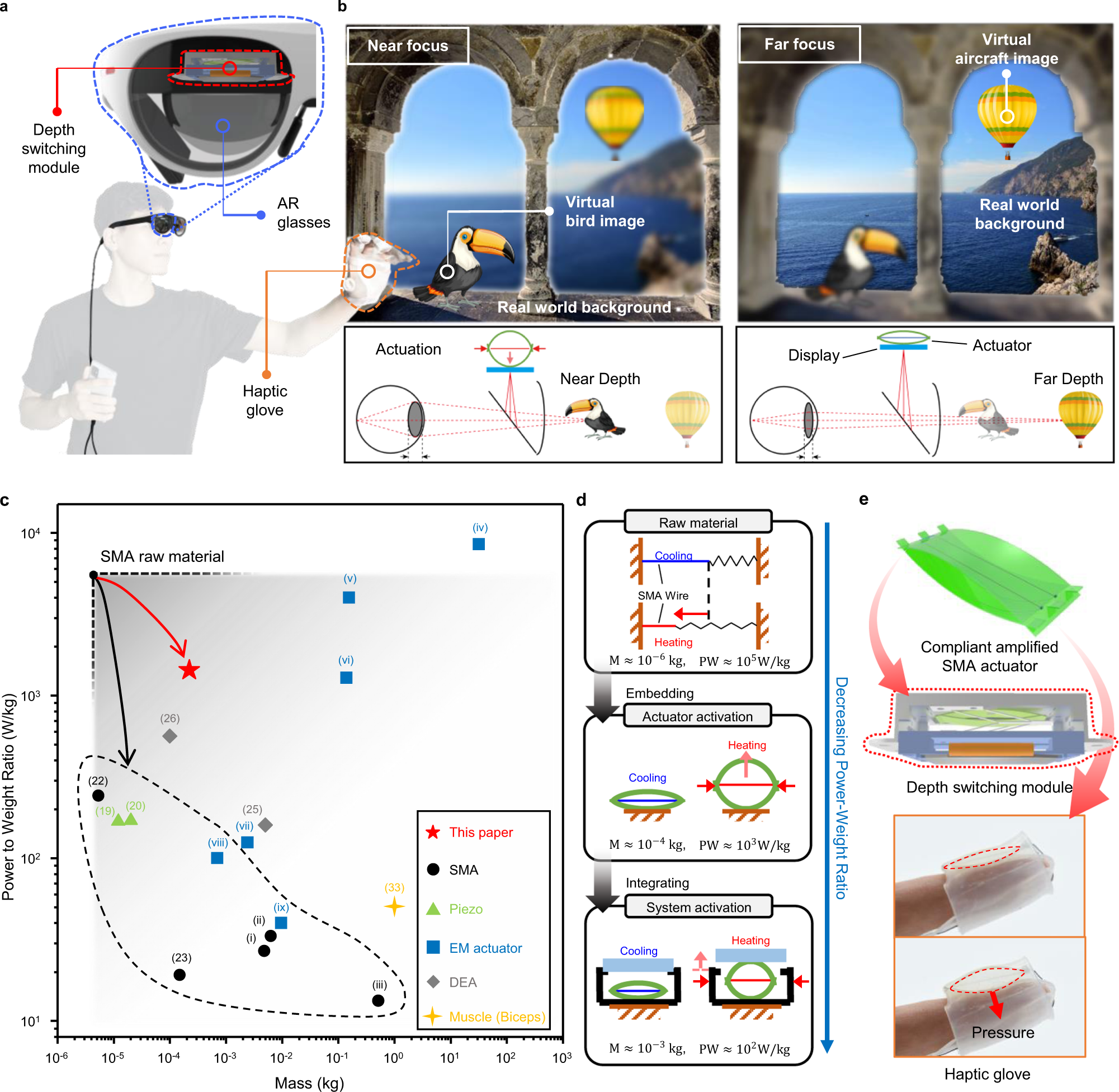
Actuating compact wearable augmented reality devices by multifunctional artificial muscle

PDF) Design methodology and case studies in actuator selection
Full Envelope Reconfigurable Control Design for the X-33 Vehicle : Cotting, M. Christopher : Free Download, Borrow, and Streaming : Internet Archive

Melt-Extruded Thermoplastic Liquid Crystal Elastomer Rotating Fiber Actuators • Advanced Optical Metrology
Actuators, Free Full-Text

Actuators MDPI

PDF) Long Shape Memory Alloy Tendon-based Soft Robotic Actuators and Implementation as a Soft Gripper

Full Closed Dust-Free Linear Actuators with Single Axis or Dual Axises for Solar Equipments Manufacturer - China Full Closed Linear Actuators, Single Axis Linear Actuators
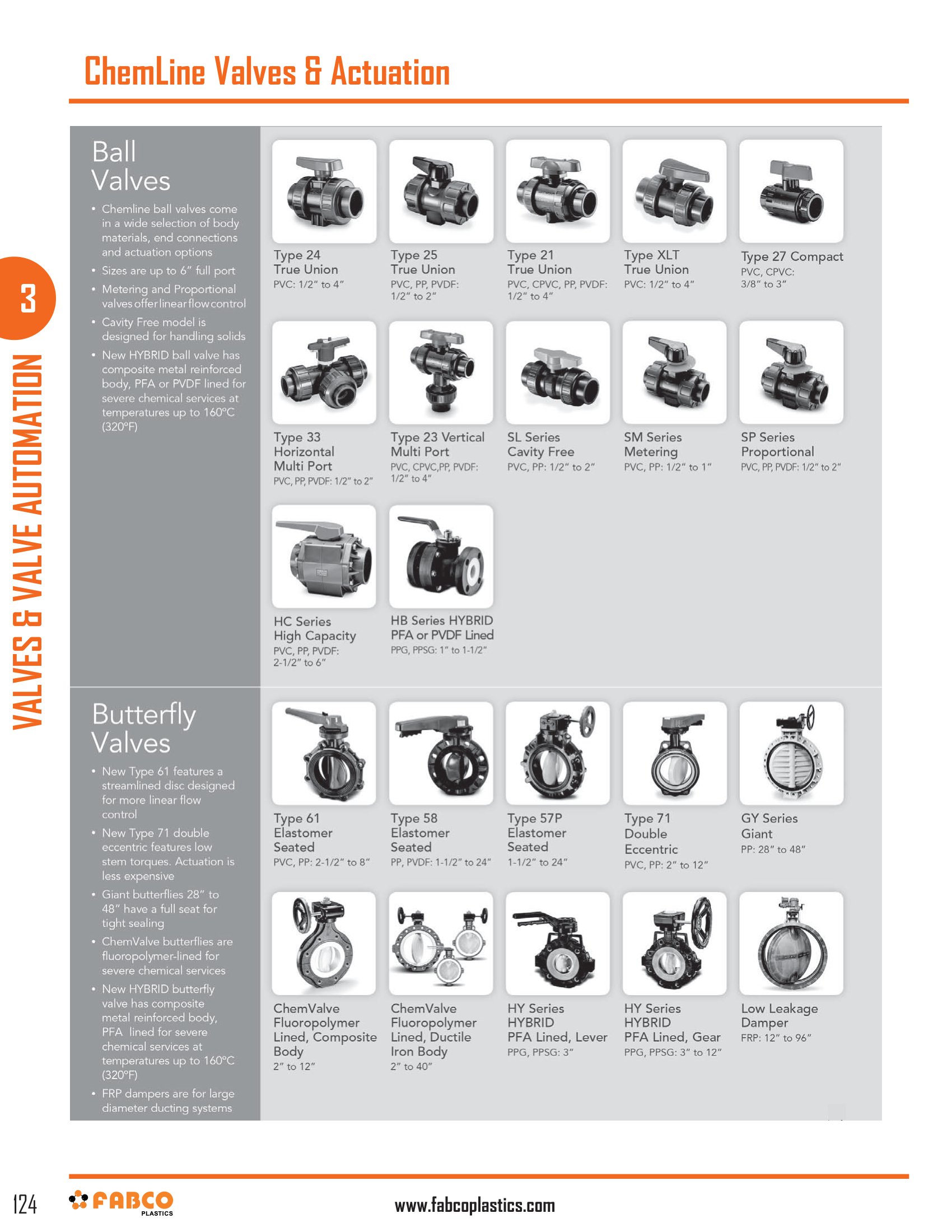
ChemLine Valves & Actuation